Navigatie is een vak apart, wat sluit het beste bij jouw aan is verschillend, bepalend of je een keuze maakt voor vooruit berekende route A naar B, of keuzes maakt ter plekke, op een topografische kaart rijdt.
Het links of rechts aanhouden op een meerstroken weg, bij topografisch houd je daar zelf al rekening mee, voor het kruispunt. Van A naar B verwacht je aanwijzingen, voice op tijd, de route lijn, links/recht aangevend, de stroken visualisatie die overeenkomt met de zichtbare situatie. Liefst meerdere situaties achter elkaar aftellend in km, op tijd. rekening houdend met je snelheid (Dat laatste, daar schort het nog wel eens aan)
Na de bijeenkomst vele jaren geleden bij RWS heb ik meermaals met de betreffende organisator gesproken, na die tijd kwam ik een schrijven tegen waar het Ministerie/RWS vermelde, dat men aan het kijken was naar een Openstreetmap+++, benieuwd wat men daar mee bedoelde, het model dat toen bestond was niet geschikt voor de toekomst.
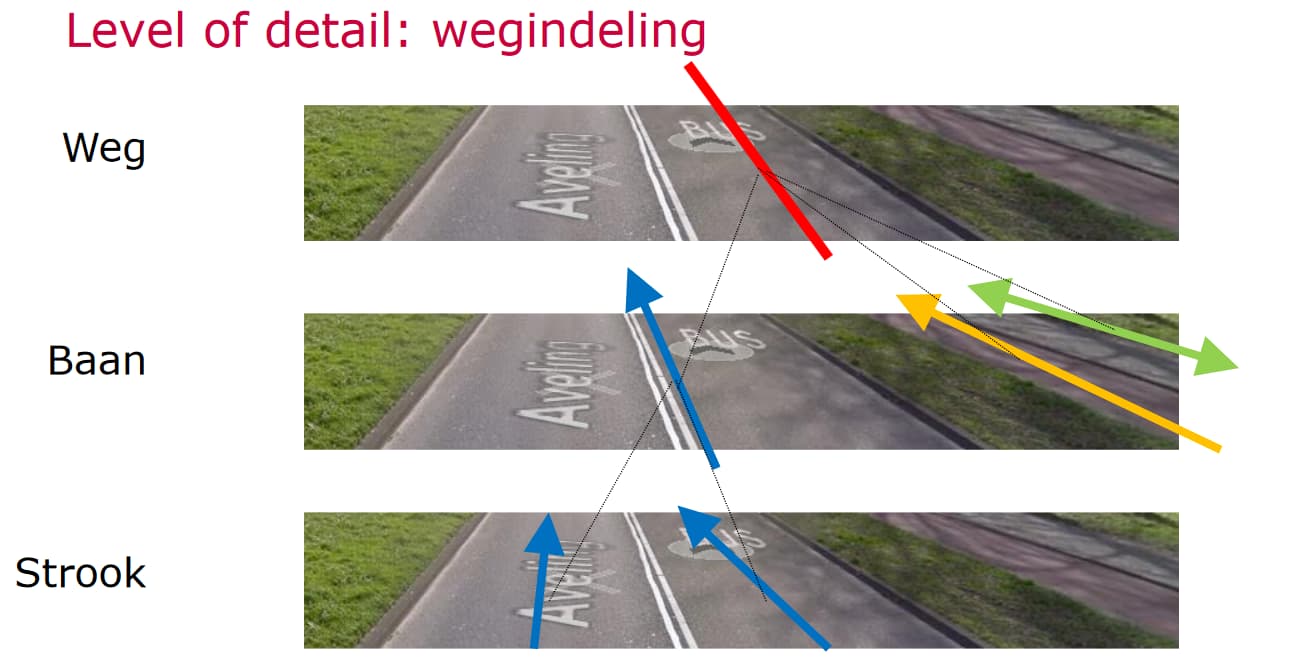
Binnen dat proces, moeten keuzes worden gemaakt. Netwerkopologie.
En zo is er binnen Openstreetmap ook een keuze gemaakt, deels ontstaan door ontwikkeling van tags. Op basis van Baan netwerktopologie.
Daar is men mee bezig gegaan.
link.
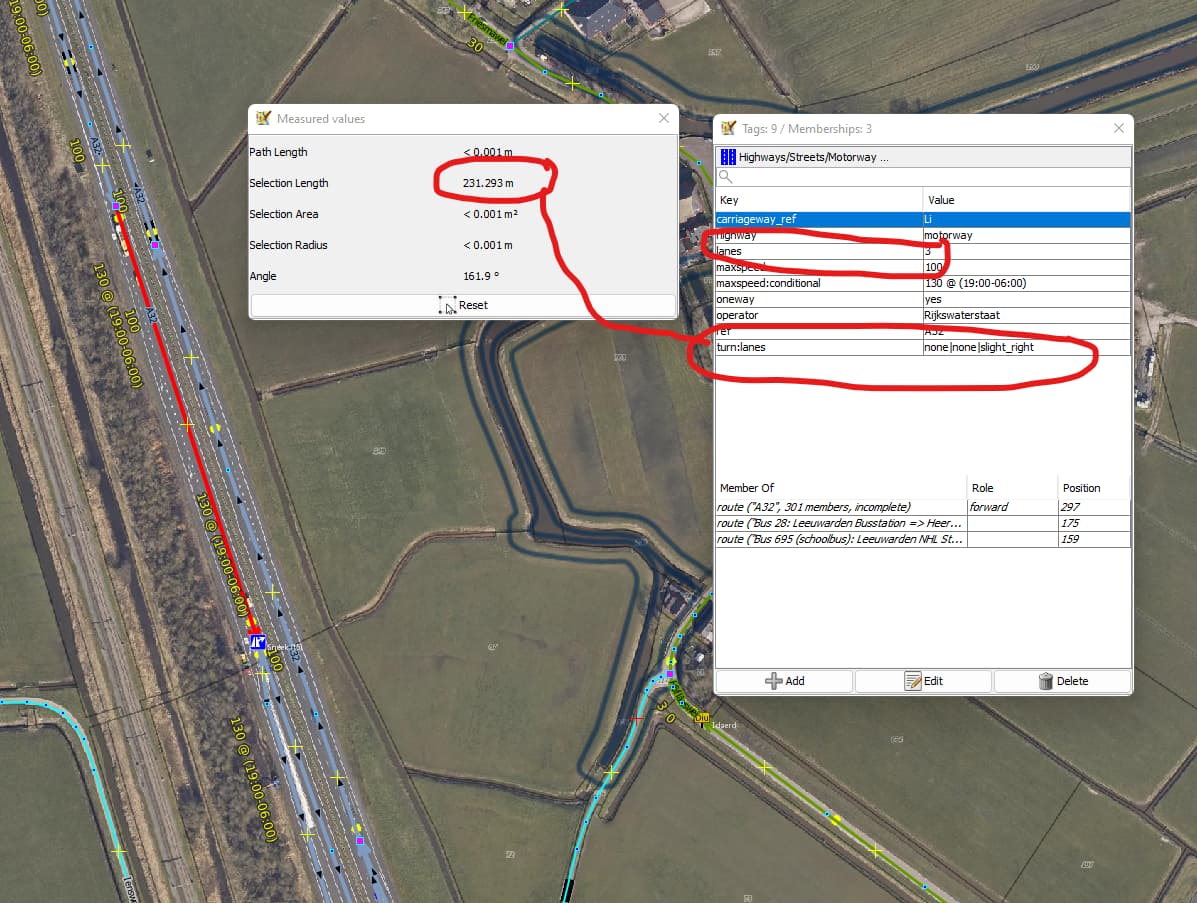
En zo is er binnen Openstreetmap, het baanmodel verder vormgegeven. Je kan zelfs stellen dat men van een wegmodel in de loop der tijd, nog steeds naar het baanmodel aan het overstappen is. (Zie ook de los getekende sidewalk)
Een strook model, wereldwijd zal/kan er niet komen.
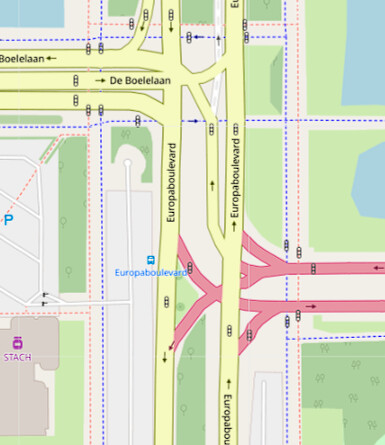
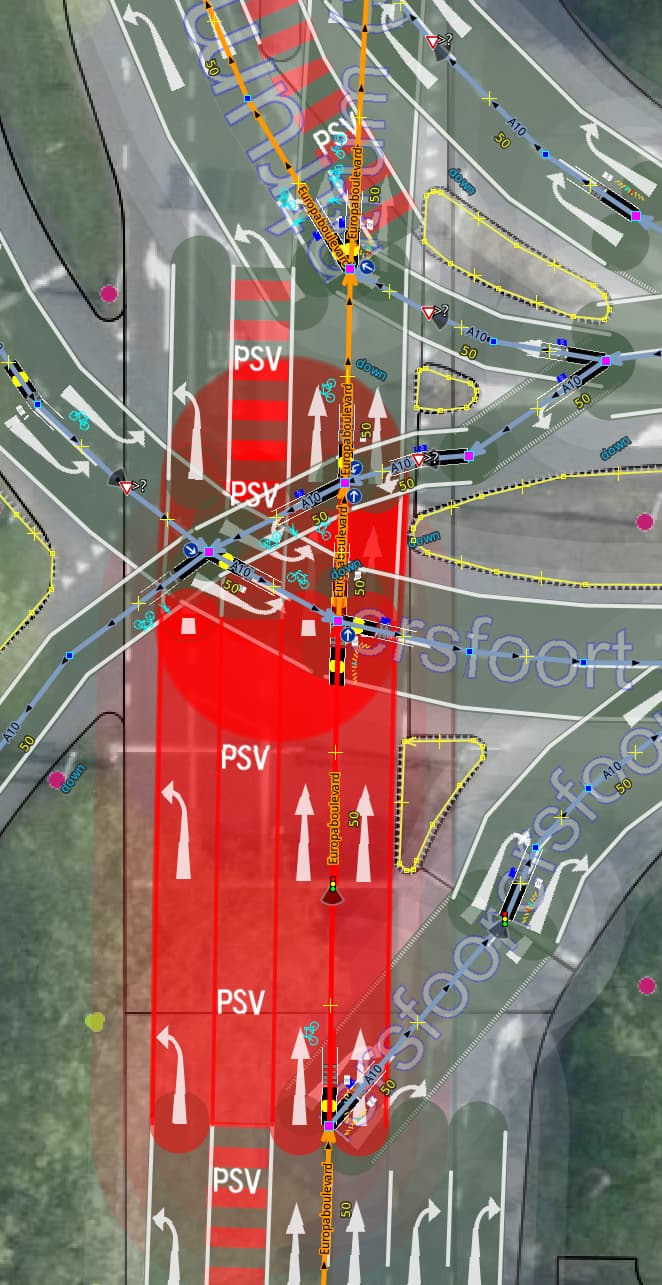
Afslaan De Doelelaan:
In Magic Earth (gps uitgeschakeld, met keuze punten op kaart) DEMO route gebruik.
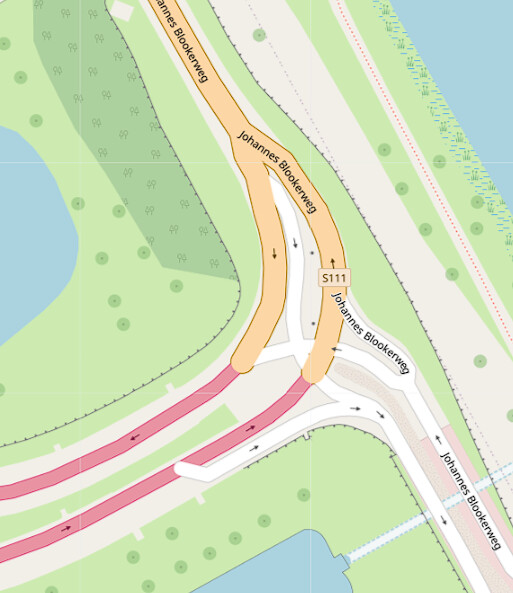
Op dit punt moet je al anticiperen om links te gaan rijden.
Dat moet duidelijk zijn in de lanevisualisatie.
Dat gaat hier fout. Lanevisualisatie. De keuze voor het verkeerslicht moet al gemaakt zijn.
De linkerafslagpijl moet helder wit zijn.
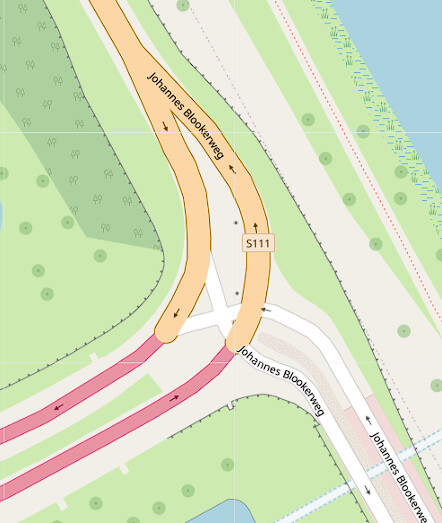
Op de rechtsaf kruising
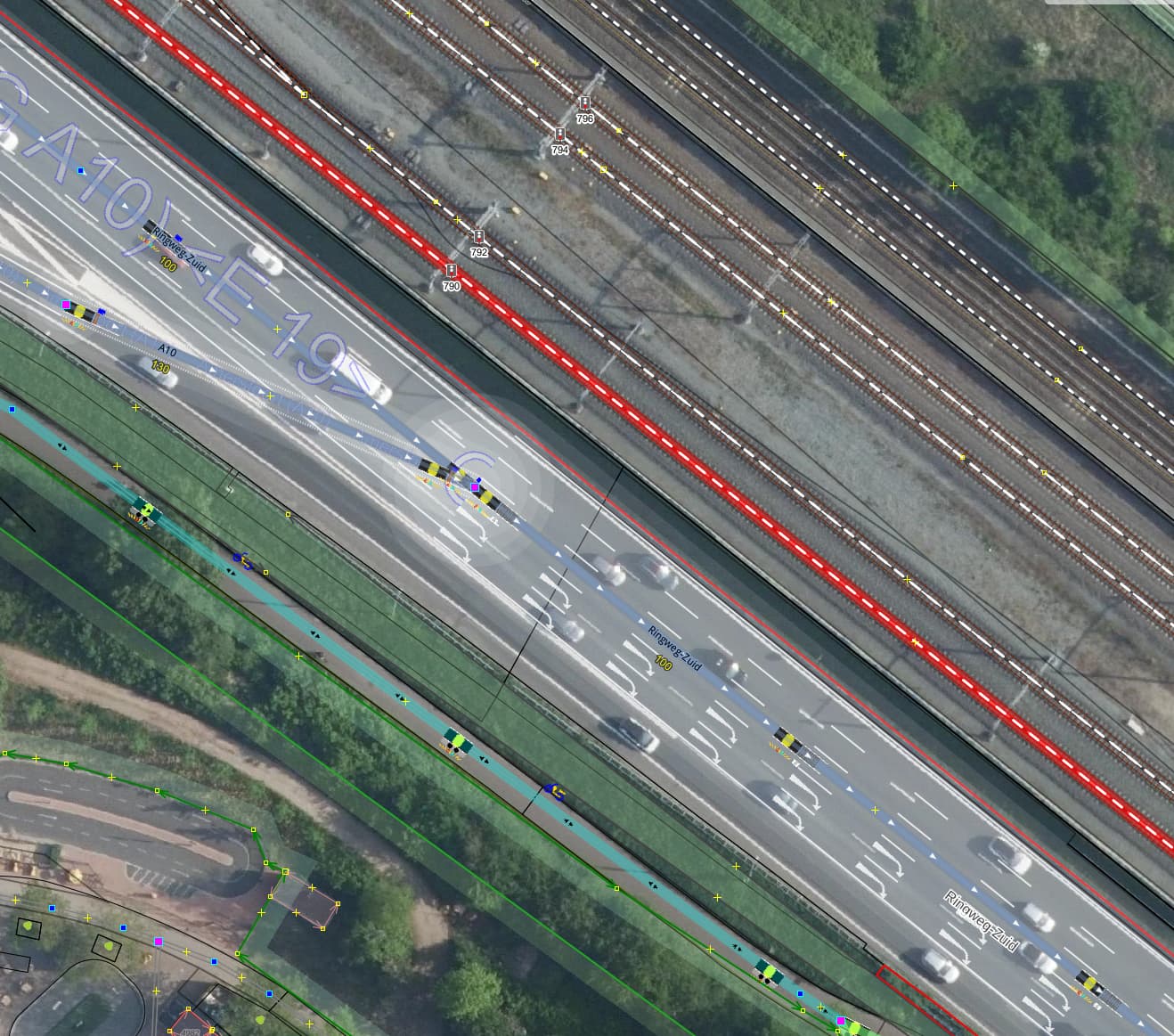
Met style, zie je gelijk t.o.v. beeld (luchtfoto) of het goed staat.
De navigatie heeft nog wat werk te doen.
Zelf anticiperen, waar gaat de blauwe lijn naar toe gaat, is anticiperen, links/rechts aanhouden.

Een strokenmodel is niet de oplossing.
Dan heb je een lanevisualisatie, die niet past bij het wegbeeld, overzicht.
Navigatie, werkt met het baanmodel.
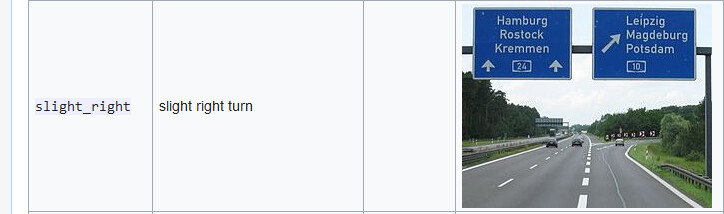
Strooknavigatie, moet er dan een relatie komen tussen associated stroken om de lane visualisatie weer te geven, wat overeenkomt met de werkelijkheid en de bewegwijzering.
Vooral dat overeenkomen met de bewegwijzering is voor mij belangrijk, zo ook in spraak, wat ik in een eerdere post in dit topic al aan gaf.
Verschil tussen alle geeft verwarring. En dus onveilige situaties.